Landing Gear Prototype 2
March 1, 2013
As mentioned at the end of our last blog post, high friction in our original landing gear design forced us to scupper the hand-drive mechanism and re-evaluate how we were going to actuate and drive the landing gear down. After a few weeks of re-design, we have found a solution we are happy with.
Last year's vehicle (2012) drove the landing gear down using a power take-off from the tire on the rear wheel. We had reliability problems due to the power-take off slipping when the wheel was wet (whenever you rode through a puddle). Our initial prototype for this year scrapped the power take off in favor of a hand cranked system. However, for prototype 2, we're returning to the power take off system as we believe it will allow our landing gear to deploy much faster and more reliably.
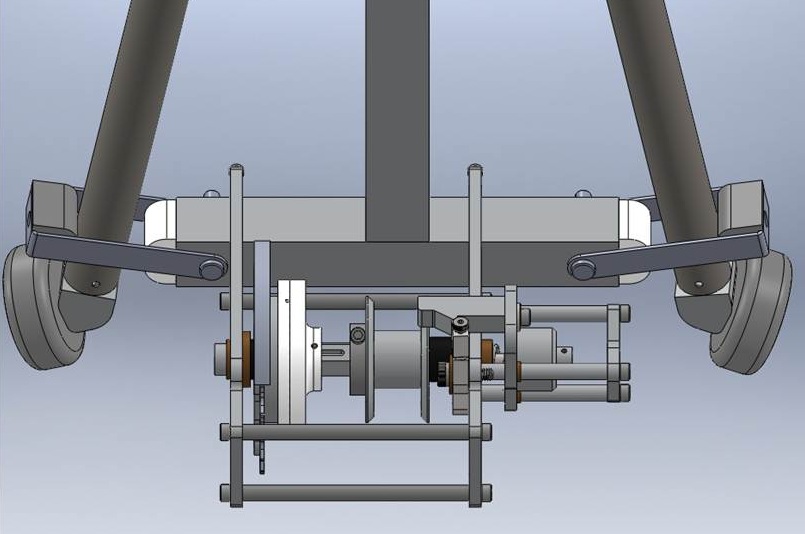
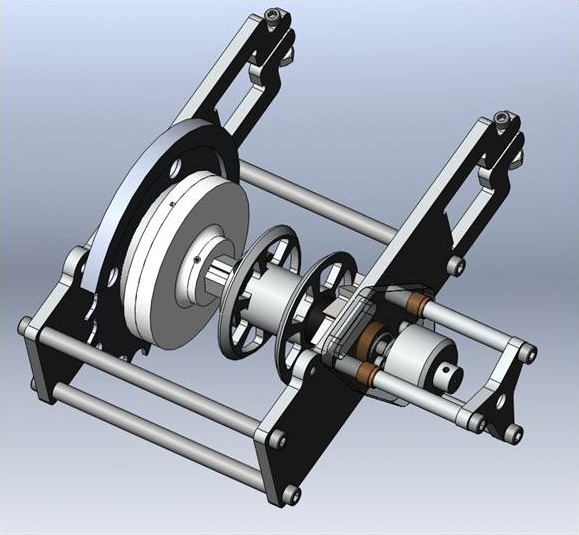
We've revised the power take-off drastically and will be using a sprocket attached to the rear wheel hub to power the landing gear deployment. The sprocket will continuously turn with the wheel, driving a chain and a sprocket riding on a bearing in our landing gear deployment mechanism. When a hand lever on the handlebars is actuated, half of a slip-clutch which is rotationally anchored to its shaft will slide into the sprocket and will transfer torque with friction. We plan to use rubber between the clutch plates to increase friction.
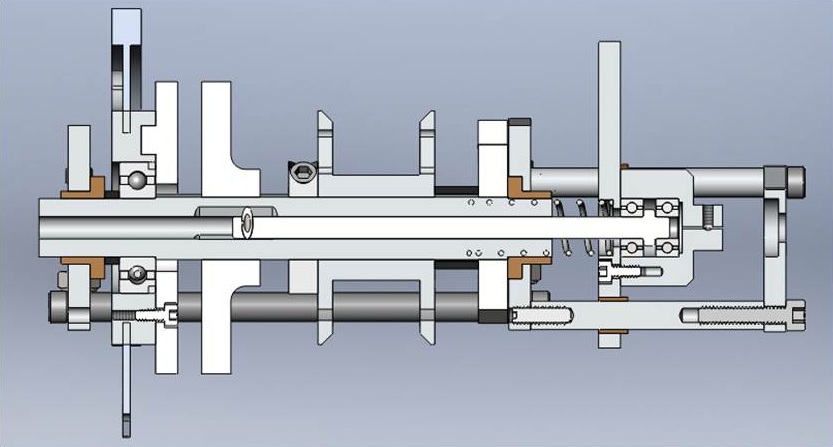
The actuation for this system is designed with a concentric actuation shaft which moves the halves of the slip clutch together when actuated. This is not unlike a concentrically-actuated dog shifter and although there are a lot of moving parts, we're pleased with the design.
Once the slip clutch actuates, the shaft in the deployment box starts spinning. This spins a spool which will wind up a length of nylon webbing to pull down the landing gear carriage. The linkage and movement of the arms is identical to in the previous prototype. A ratchet located on the shaft keeps the landing gear down until the pawl is released by pulling the actuation handle half-way. This mechanism is achieved with a small one-way pawl-actuating latch.
We held a design review on February 14 to solicit feedback on the system. The slides from this are available here. After the design review, we feel confident in the system and have begun manufacturing.
Manufacturing is going to proceed rapidly over the next month as we make our fairing and start putting components inside. Also coming up over the horizon is the design report, due March 25th.